Since we know all about the bodies, err, magnitudes of vectors, we now need to look at the directions of vectors. We can equate the direction of the vector to the head of the griffin or the minotaur. This is especially convenient because the head of the vector tells its direction.
For vectors with tails on the origin, we usually measure the direction of a vector as the counterclockwise angle from the positive x-axis to the vector.
We would say this vector has direction θ:
When finding the direction of a vector, use radians unless told otherwise. We recommend reviewing the unit circle before continuing.
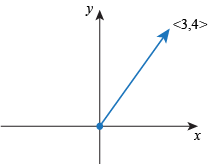
When given a vector and asked to find its direction, the first thing we figure out is which quadrant the vector is in. Then we check to see if our answer makes sense.
When a vector is in Quadrant I, we can find its direction θ in one step:

When a vector isn't in Quadrant I, we can't trust the arctan function to give the correct direction of the vector. Remember that arctan has a range (-π/2, π/2). Instead, we use the arctan function to find the reference angle of the vector. If we know the reference angle and which quadrant the vector is in, we can find the direction of the vector.
The reference angle is the smallest angle between the vector and the x-axis.
We can think of the reference angle as the "family" the angle is in, whether it's one of the  angles, one of the
angles, one of the  angles, and so on.
angles, and so on.
The reference angle is always between 0 and  radians.
radians.
When a vector lies along the x- or y-axis, we don't have to bother with the arctan stuff. All we have to do is see whether the vector is at an angle of 0, , π, or  ;
;